Takyk Servo DC Motor 46S / 12V-8A1

Servo DC motorynyň esasy aýratynlyklary: (beýleki modeller, öndürijilik aýratynlaşdyrylyp bilner)
| 1. Bahalandyrylan naprýa .eniýe : | DC 12V | 5. Bahalandyrylan tizlik : | 00 2600 aýlaw |
| 2. Işleýän naprýa rangeeniýe diapazony : | DC 7.4V-13V | 6. Toky blokirlemek : | ≤2.5A |
| 3. Bahalandyrylan güýç : | 25W | 7. Tok ýüklemek : | ≥1A |
| 4.Rotasiýa ugry : | CW çykyş şahasy ýokarda | 8.Wil arassalamak : | .01.0mm |
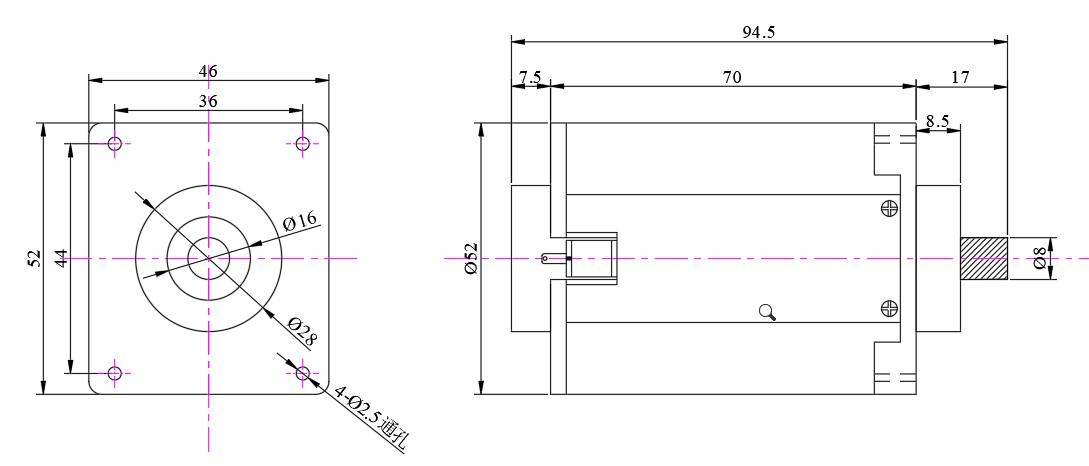
Önümiň daşky görnüşi diagrammasy
Möhleti gutarýan wagt
Önümçilik senesinden başlap, önümiň ygtybarly ulanylyş möhleti 10 ýyl, üznüksiz iş wagty ≥ 2000 sagat.
Önüm aýratynlyklary
1. Ykjam, ýer tygşytlaýjy dizaýn ;
2.Bally rulman gurluşy ;
3. Çotganyň uzak ömri ;
4. Çotgalara daşarky giriş motor çalyşmasyny hasam uzaltmak üçin aňsat çalyşmaga mümkinçilik berýär ;
5. Başlangyç moment ;
6. Çalt durmak üçin dinamiki tormoz ;
7. Yzyna gaýtarylýan aýlaw ;
8. Simönekeý iki simli birikme ;
9.Klass F izolýasiýa, ýokary temperaturaly kebşirleýji kommutator.
10. Pes ses we durnukly işlemek bilen, ýokary tizlikli we pes ses talap edýän ýagdaýlar üçin has amatlydyr.
Goýmalar
Akylly öý, takyk lukmançylyk enjamlary, awtoulag sürüjisi, sarp ediş elektronikasy önümleri, massa and we saglygy goraýyş enjamlary, şahsy ideg gurallary, akylly robot geçiriş, senagat awtomatlaşdyryşy, awtomatiki mehaniki enjamlar, sanly önümler we ş.m. ugurlarynda giňden ulanylýar.
Öndürijilik suraty



DC servo motorynyň aýratynlyklary haýsylar?
DC servo hereketlendirijisinde polo positiveitel we otrisatel terminallar bilen göni tok (DC) bar.Bu terminallaryň hersiniň arasynda tok birmeňzeş ugurda akýar.Sero motorynyň inersiýasy takyklyk we takyklyk üçin has kiçi bolmaly.DC serwilerinde ýokary tork-agram derejesini saklamak arkaly gazanylýan çalt seslenme bar.Mundan başga-da, DC serwasynyň tizlik häsiýetnamasy çyzykly bolmaly.
DC servo hereketlendirijisi bilen, häzirki dolandyryş AC servo hereketlendirijisinden has ýönekeý, sebäbi ýeke-täk dolandyryş talaby häzirki armatura ululygydyr.Motoryň tizligi nobat aýlawy bilen dolandyrylýan impuls giňligi modulýasiýasy (PWM) bilen dolandyrylýar.Dolandyryş akymy torky dolandyrmak üçin ulanylýar, netijede her bir iş siklinde ygtybarly yzygiderlilik bolýar.
DC servo hereketlendirijileri, garaguş AC hereketlendirijilerinden has uly inersiýa eýe.Bu we çotganyň sürtülme garşylygynyň ýokarlanmagy, gural hyzmatlarynda ulanylmagynyň öňüni alýan esasy faktorlardyr.Kiçijik ululyklarda, DC servo hereketlendirijileri, esasan, howa we dolandyryş çäklendirmelerinde hereketlendirijiniň agramy we giňişlik çäklendirmeleri hereketlendirijiniň bir göwrümine iň ýokary güýji üpjün etmegini talap edýär.Adatça aralyk wezipe üçin ýa-da adatdan daşary ýokary başlangyç momenti zerur bolan ýerlerde ulanylýar.DC servo hereketlendirijileri elektromehaniki hereketlendirijilerde, prosessor dolandyryjylarynda, programmirleme enjamlarynda, senagat awtomatlaşdyryş robotlarynda, CNC maşyn gurallary enjamlarynda we şuňa meňzeş başga-da köp programmalarda ulanylyp bilner.
DC servo hereketlendirijisi dört esasy komponentden ybarat gurnama bolup, DC hereketlendirijisi, ýagdaýy duýýan enjam, dişli gurnama we dolandyryş zynjyrydyr.DC hereketlendirijisiniň zerur tizligi ulanylýan naprýa .eniýa baglydyr.Motoryň tizligini dolandyrmak üçin potensiometr ýalňyşlyk güýçlendirijisiniň girişleriniň birine ulanylýan naprýa .eniýäni öndürýär.







