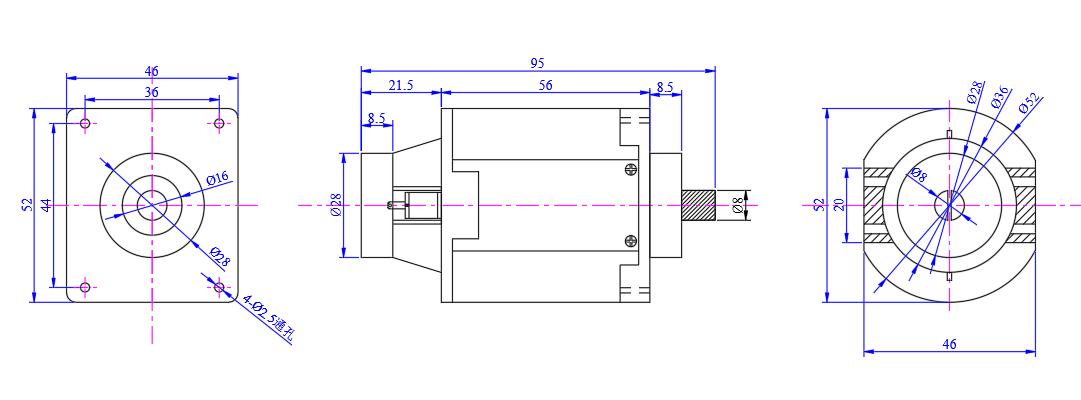
Precision Servo DC Motor 46S / 12V-8B1

Servo DC motorynyň esasy aýratynlyklary: (beýleki modeller, öndürijilik aýratynlaşdyrylyp bilner)
| 1. Bahalandyrylan naprýa .eniýe : | DC 12V | 5. Bahalandyrylan tizlik : | 00 2600 aýlaw |
| 2. Işleýän naprýa rangeeniýe diapazony : | DC 7.4V-13V | 6. Toky blokirlemek : | ≤2.5A |
| 3. Bahalandyrylan güýç : | 25W | 7. Tok ýüklemek : | ≥1A |
| 4.Rotasiýa ugry : | CW çykyş şahasy ýokarda | 8.Wil arassalamak : | .01.0mm |
Önümiň daşky görnüşi nyşany
Möhleti gutarýan wagt
Önümçilik senesinden başlap, önümiň ygtybarly ulanylyş möhleti 10 ýyl, üznüksiz iş wagty ≥ 2000 sagat.
Önüm aýratynlyklary
1. Ykjam, ýer tygşytlaýjy dizaýn ;
2.Bally rulman gurluşy ;
3. Çotganyň uzak ömri ;
4. Çotgalara daşarky giriş motor çalyşmasyny hasam uzaltmak üçin aňsat çalyşmaga mümkinçilik berýär ;
5. Başlangyç moment ;
6. Çalt durmak üçin dinamiki tormoz ;
7. Yzyna gaýtarylýan aýlaw ;
8. Simönekeý iki simli birikme ;
9.Klass F izolýasiýa, ýokary temperaturaly kebşirleýji kommutator.
Goýmalar
Akylly öý, takyk lukmançylyk enjamlary, awtoulag sürüjisi, sarp ediş elektronikasy önümleri, massa and we saglygy goraýyş enjamlary, şahsy ideg gurallary, akylly robot geçiriş, senagat awtomatlaşdyryşy, awtomatiki mehaniki enjamlar, sanly önümler we ş.m. ugurlarynda giňden ulanylýar.
Üç artykmaçlyk
1. Gowy motor balansy :
1.1 Motoryň deňagramlylygyny ýokarlandyrmak we hereketlendirijiniň emele getirýän sesini ep-esli azaltmak üçin ösen tehnologiýany kabul ediň.
2. Kömürturşy çotgasynyň öndürijiliginiň iň oňat gabat gelişi :
2.2 Motor we uglerod çotgasynyň hyzmat möhletini gowulandyrmak.(Uglerod çotgalary indi sarp edilmeýär !!!)
3. Gowy magnetizm :
3.3 Şol bir magnit tork döredilende güýç sarp edilişi netijeli azalýar.
Öndürijilik suraty



Sürüji ýörelgesi
1. Serwo esasan ýerleşiş üçin impulslara daýanýar.Esasan, sero hereketlendirijisi impuls alanda, süýşmegi gazanmak üçin impulsa laýyk burçy aýlanjakdygyna düşünip bolar.Servo motorynyň özi impuls ibermek funksiýasyna eýe bolany üçin, sero Her gezek hereketlendiriji bir burçy aýlananda, sero motory tarapyndan alnan impulslar bilen ýa-da ýapyk aýlaw diýlip atlandyrylýan mukdarda impuls iberer. .Şeýlelik bilen ulgam sero motoryna näçe impulsyň iberilendigini we bir wagtyň özünde näçe impulsyň kabul edilendigini biler.Impuls gaýdyp gelýär, şonuň üçin hereketlendirijiniň aýlanmagy 0.001mm ýetip bilýän takyk ýerleşişe ýetmek üçin takyk dolandyrylyp bilner.
DC servo hereketlendirijisi ýörite DC çotga serw motoryna degişlidir - hereketlendirijiniň arzan bahasy, ýönekeý gurluşy, uly başlangyç momenti, giň tizlik diapazony, aňsat dolandyryşy we tehniki hyzmaty talap edýär, ýöne saklamak aňsat (uglerod çotgalaryny çalyşmak) we şeýle bolar elektromagnit päsgelçiligi döredýär.Daşky gurşawyň talaplary bar.Şol sebäpli, çykdajylara duýgur bolan umumy senagat we raýat ýagdaýlarynda ulanylyp bilner.
DC servo hereketlendirijilerine DC çotgasyz sero hereketlendirijileri hem girýär - hereketlendirijiler ululygy az, agramy ýeňil, çykarylyşy uly, çalt jogap berýär, tizligi ýokary, inersiýada kiçi, aýlawda tekiz, torkda durnukly we motor güýji çäkli .Akyl-paýhasa düşünmek aňsat we onuň elektron aragatnaşygynyň usuly çeýe bolup, inedördül tolkunlaryň kommutasiýasy ýa-da sinus tolkunlarynyň kommutasiýasy bolup biler.Motor tehniki taýdan hyzmat etmeýär we uglerod çotgalarynyň ýitgisi ýok.Highokary netijeliligi, pes işleýiş temperaturasy, pes ses, kiçi elektromagnit şöhlelenmesi we uzak ömri bar.Dürli gurşawda ulanylyp bilner.







